產品介紹
Our Products

產品型號
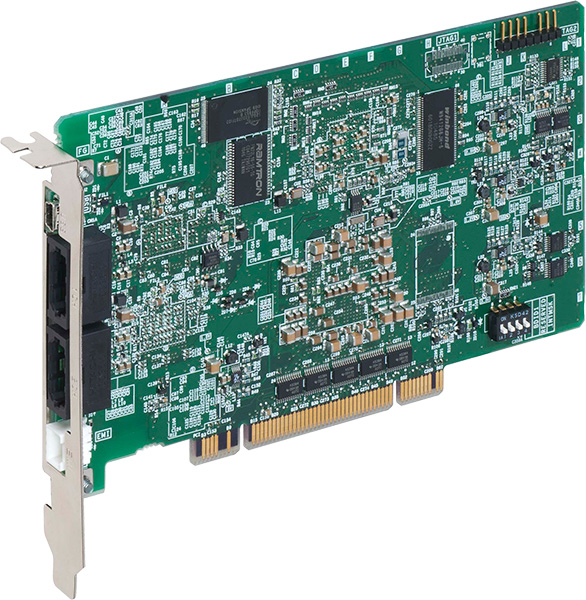
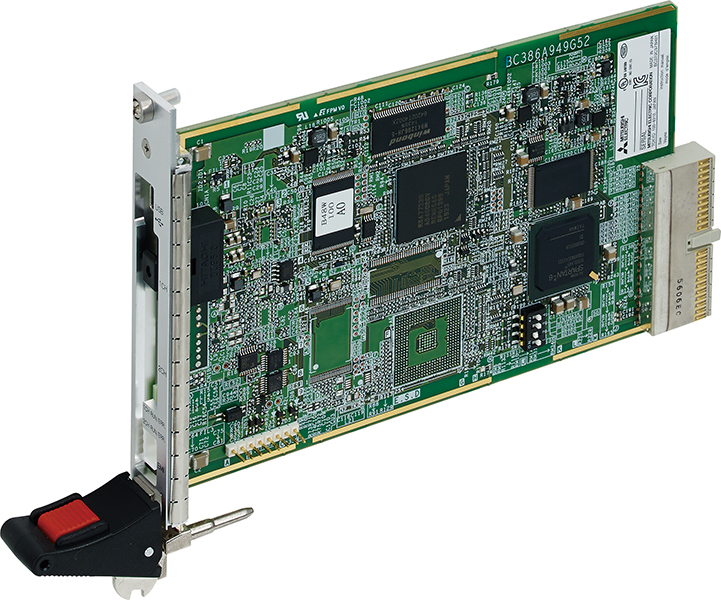
三菱電機 MR-MC系列PC-Based位置控制介面卡
| 型號 | 最大控制軸數 | 介面 | |
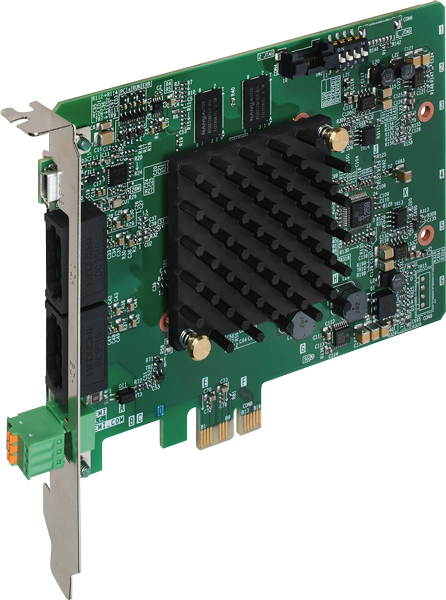 |
MR-MC341 | 64軸 | PCI Express® |
 |
MR-MC241 2025年8月停產 |
32軸 | PCI Express® |
 |
MR-MC241N | 32軸, 2系統 | PCI Express® 1.1 ×1 |
 |
MR-MC240 2025年8月停產 |
20軸 | PCI Express® |
|
MR-MC240N | 20軸, 1系統 | PCI Express® 1.1 ×1 |
 |
MR-MC211 2025年8月停產 |
32軸 | PCI bus |
|
MR-MC210 2025年8月停產 |
20軸 | PCI bus |
 |
MR-MC220U3 2025年8月停產 |
20軸 | Compact PCI® |
 |
MR-MC220U6 2025年8月停產 |
20軸 | Compact PCI® |
產品說明
系統構成

※1: MR-MC200系列上要使用外部緊急停止時,請另行訂購緊急停止輸入連接器。
特長
• 實現了0.22 ms的控制週期(32個軸控制時)和最多64個控制軸。 MR-MC341
• 有效利用一般電腦用電路板及程式資產。
• 可以使用事件驅動程序中斷方式建立程式。
• 具備Point table定位功能。
• 提供API 函式庫,提高客戶的軟體開發效率。
• 與即時作業系統(INtime,RTX等)相容。
導入優點
|
♦ 構成圖
|


開發環境
|
只要在裝有Windows®OS的PC上運行的Microsoft VisualStudio®專案中,追加定位控制的API函式庫,就可以輕易完成使用者程式。
►公用工具(Utility)位置控置板卡的公用工具內包含程式開發所需的以下軟體。 測試工具 API 函式庫 驅動程式
測試工具 用於設定應用程式開發所需的參數,設定定位Point 資料,伺服調整等操作確認以及故障發生時異常的查詢。
易於測試操作檢查 使用定位測試操作功能和參數/定位Ponit資料設定功能,可以輕鬆地執行測試操作。
保養/維護 由於可以檢查32個監視資料和16個位元信號的取樣波形,因此可以做為程式的確認或起動順序的驗證。
API 函式庫 用在電腦上開發應用軟體的API函式庫。
驅動程式使用者開發的程式透過PCIExpress®/ CompactPCI®/ PCI bus對定位控制板卡控制的軟體。 客戶不需要另外準備驅動程式。
|





高速同步網路 SSCNET III/H
|
• 高速化的資料傳輸,速度提高到150Mbps (單方向為300 Mbps),是傳統型號的3倍。大大地提高了系統反應速度。 • 通信週期為0.222 ms的高速串列通訊,實現設備的平穩控制。 • 對於需要高度精確同步的設備,完全同步通信可實現更高的性能。 • 每個系統的最長可達3200m (站間最大100m x最多32個控制軸)的長距離配線。可以支援處理大型系統。 • 同一系統中支援SSCNET III/H 及SSCNET III的伺服驅動器可以在一起合併使用。(混合時的通信速度:雙向50Mbps) ※SSCNET (Servo System Controller Network)
|

感測器單元 MR-MT2000系列
|
感測器單元MR-MT2000系列包括與SSCNET III/H相容的Head unit和輸出入、脈波輸出入、類比輸出入和編碼器介面的模組組成。使用者可以根據用途選擇所需的模組 。 由於連接到感測器單元的各種輸出入信號與控制週期同步,因此可以進行變化較小的處理,實現設備的高速,高精度。
|

SSCNET III/H Head unit LJ72MS15
|
使用SSCNET III/H Head unit,便可以透過SSCNET III/H方式連接機能模組,例如I/O,類比和高速計數器。 這些模組可以作為控制器的遠端局的輸入/輸出。 I/O信號和類比輸出入信號直接從伺服放大器側的控制盤連線,進而達到省配線的效果。 注意:Head unit設定時需要MELSOFT GX Works2。
※1:檢查設備中使用的感測器的輸出入信號可以通過Head unit讀取和寫入。 ※2:手動開/閉信號輸出。
|

定位控制
|
在C語言中使用API 函式庫來開發應用程式進行定位控制。 從Point table中所設定的位置資料開始運轉,直到中斷事件發生進入待機狀態。
|

加速比(Jerk ratio)加減速 (平穩變速以抑制振動)
|
MR-MC341 當想要同時達到平穩加速和縮短加速時間時...
同時具有平滑加速的區間和保持最大加速度的區間,可以在保持平滑度的同時縮短加速時間。 區間A:加速平穩的部分 區間B:以最大加速度加速的部分 區間C:平穩加速的部分 區間D:等速部分
|

制振指令濾波器1 (抑制低頻振動)
|
MR-MC341 當想要抑制伺服驅動器無法設定的低頻振動時... 位置控制期間,抑制載台的振動或龍門架構等機器端擺動的濾波功能。 可於機器共振抑制濾波器無法設定的低頻振動抑制或頻率變更等用途使用。
V:定位速度 t:時間 實線:濾波後速度波型 虛線:濾波前速度波型
|

它軸起動機能
|
它軸起動機能是根據它軸起動條件和它軸操作內容,來自動起動另一個軸運轉起動的機能。 由於軸是由控制器自動起動的,因此可以縮短搬送設備Tact time。
<動作例> 1. 軸2從起點往P1 移動 2. 軸2通過事先設定的位置時,它軸(軸1)起動 3. 軸2到達P1 4. 軸1通過事先設定的位置時,它軸(軸2)起動 5. 軸1到達P2 6. 軸2到達終點
|



通過位置中斷機能
|
自動運轉中經過設定的位置時,此機能可輸出中斷。 發生中斷時,將可起動使用者程式對應的中斷處理。 • 主機(OS)可以根據伺服軸的位置來高速事件處理。
<動作例> 1. 從P1移至P2時發生通過位置中斷 2. 在中斷處理中打開視覺相機的快門 3. 在中斷處理中,打開視覺相機的快門,讀取位置資料,可以減少快門延遲時間,進而讀取高精度的位置資料。
|

推壓控制
|
可以從位置控制平穩地切換到推壓控制模式而不會停止。 由於在推壓控制中也會管理目前位置,因此即使返回位置控制後,也可以使用絕對位置座標進行定位。
|


介面(Interface)模式
|
內建介面模式,可透過SSCNET III/H實現客戶特定的運動控制 該機能可將使用者程式設定的每個運算週期的位置命令直接發送到伺服驅動器,由伺服驅動器直接控制。 它不僅支援位置控制,還支援速度控制和扭力(轉矩)控制。 客戶的位置・速度和轉矩的指令生成知識與利用SSCNET III/H的伺服驅動器MR-J4-B可以高速同步來進行控制。
• 由於SSCNET III/H的處理是由C語言和定位控制板卡控制,因此使用者程式可以專注於資料處理、人機界面和運動控制。 • 透過電腦的即時OS,可以用運算周期中斷來執行定周期的運動控制。 • 最大64段的位置指令緩衝區,即使OS為非即時OS(僅Windows),也可以用0.22 ms的最小周期發出命令,來實現高精度的軌跡控制。
|

控制規格一覽
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
模組規格一覽
※1:MR-MC200系列,在製作電纜時需要連接器和壓接工具。(MR-MC341內含緊急停止入力接頭)
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||